地址:深圳市罗湖区文锦广场文盛中心1401
邮箱:wawa209@126.com
“伺服(Servo)”一词源于希腊语“奴隶”意即“伺候”和“服从”,伺服系统就是指可以按照外部指令进行人们所期望的运动的系统,实现包括位置、方位、状态等输出量的自动控制。它不仅是工业自动化的关键环节,也是实现精准定位、精准运动的必要途径。作为伺服系统的执行单元,伺服电机种类繁多,其中永磁同步伺服电机因其高效能、操作易等优点,逐渐成为市场主流。相比于步进电机,同服电机在控制精度、稳定输出、过载能力等性能上优势明显,在工业领域广泛使用。本文将简单介绍伺服系统以及伺服电机的工作原理及其分类,并对伺服电机的常用性能指标作出说明。
伺服系统构成及其工作原理
伺服系统主要由伺服驱动器、编码器和伺服电机等部件构成,其运动原理图如下图所示
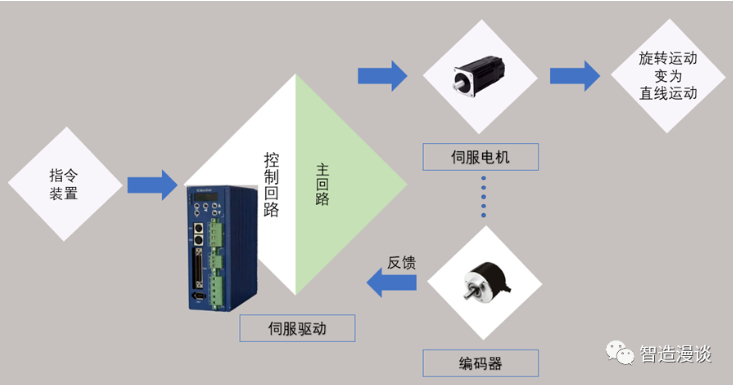
伺服系统是一种自动控制系统,能使物体的位置、方位、状态等输出被控量跟随输入目标(或给定值)的变化而变化。伺服驱动器在接收下达的控制命令后,会发出信号给伺服电机驱动其转动;与此同时,嵌入电机的编码器将伺服电机的运动参数反馈给伺服驱动器,由伺服驱动器完成对信号的汇总、分析和修正。由此,伺服系统以闭环的形式精确控制了执行机构(电机等机械传动装置)的输出变量。
伺服驱动器、伺服电机及编码器的功能介绍如
01
伺服驱动器
1、构成
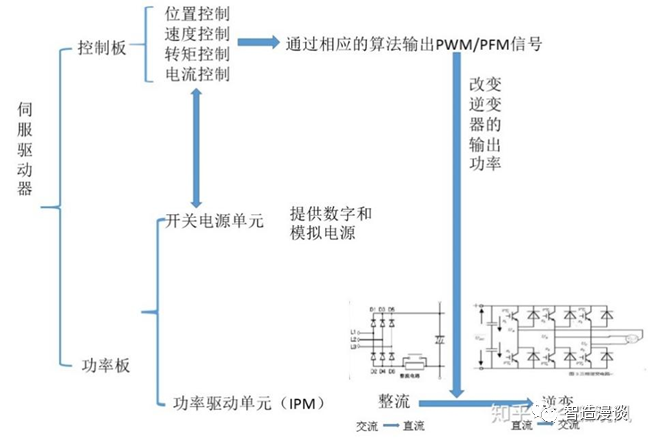
伺服驱动器主要由伺服控制单元、功率驱动单元、通讯接口单元组成。其中伺服控制单元包括位置控制器、速度控制器、转矩和电流控制器等。伺服驱动器大体可以划分为功率板和控制板两个模块。功率板是强电部分(功率大、电流大、频率低的电力部分),其中包括两个单元,一是功率驱动单元IPM,用于电机的驱动,二是开关电源单元,为个系统提供数字和模拟电源。控制板是弱电部分,是电机的控制核心,也是伺服驱动器技术核心控制算法的运行载体。控制板通过相应的算法输出脉冲宽度调制(PWM)或脉冲频率调制(PFM)信号,作为驱动电路的驱动信号,来改变逆变器的输出功率,以达到控制交流伺服电机的目的。其中,逆变器是把直流电能(电池、蓄电瓶)转变成定频定压或调频调压交流电(一般为220V,50Hz正弦波)的转换器。
伺服驱动器主要材料成本中,IGBT和DSP芯片占总材料成本的50%以上。IGBT即绝缘栅双极型晶体管,是由双极型三极管和绝缘栅型场效应管组成的复合全控型电压驱动式功率半导体器件,兼有金氧半场效晶体管的高输入阻抗和电力晶体管的低导通压降两方面的优点,用于功率驱动单元,能够辅助直流电转变为交流电。我国IGBT市场90%以上被外资企业占领,在短时间内IGBT实现国产化较为困难。
2、工作原理
控制单元是整个交流伺服系统的核心,是系统位置控制、速度控制、转矩和电流控制器。控制板所采用的数字信号处理器(DSP)除了具有快速的数据处理能力外,还集成了丰富的用于电机控制的专用集成电路,如AC/DC(交流直流)转换器、PWM发生器、定时/计数器电路、异步通讯电路、CAN(控制局域网络)总线收发器以及高速的可编程静态RAM(随机存取存储器)和大容量的程序存储器等,可以实现比较复杂的控制算法,实现数字化、网络化和智能化。
功率器件普遍采用以智能功率模块(IPM)为核心设计的驱动电路,IPM内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路。功率驱动单元首先通过三相全桥整流电路对输入的三相电或者市电进行整流,得到相应的直流电。经过整流好的三相电再通过逆变器变频输出交流电来驱动伺服电机。功率驱动单元的整个过程可以简单的说就是AC-DC-AC的过程
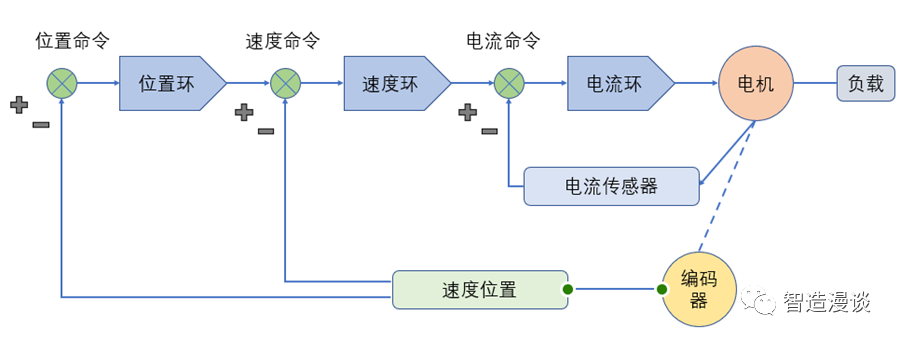
伺服回路可根据输入命令信号提供电机的比例控制。简单的伺服驱动器包含用于控制扭矩的单个伺服回路。更先进的伺服驱动器可增设速度环,并且还可以包含位置环。在完整的伺服驱动器系统中,运动控制器发出的数字信号将命令所需的运动轨迹利用这三个伺服回路来优化性能。每个环路向后续环路发送信号,并监测适当的反馈元件,从而进行实时更正,以匹配命令参数。
02
伺服电机
1、构成
市场主流的交流伺服电机由前后端盖、轴承、定子、转子以及编码器等部件组成,其核心部件是定子、转子和编码器(编码器在下文单独介绍)。交流伺服电机结构图如下图所示
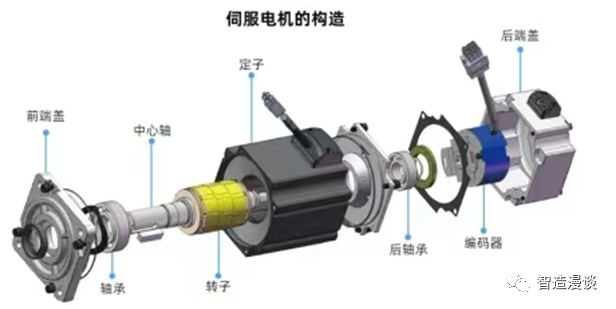
定子主要由机座、定子铁芯和定子绕组三部分组成,其中机座一般用铝或不锈钢制成,用于固定和支撑定子铁芯;定子铁芯由硅钢片或铁镍合金善压而成,用于镶嵌定子绕组;定子绕组是定子铁芯上固定的线匝,均匀地分布在定子槽里,主要用于在通电后形成旋转磁场。
永磁式同步伺服电机的转子主要由转子铁芯、永磁体和转轴组成,其中转子铁芯由硅钢片看成,能增加电感线圈(定子绕组)的磁通量,实现电磁功率的最大转换;永磁体材料分为铝镍钴系永磁合金、铁铬钴系永磁合金、永磁铁氧体、稀土永磁材料和复合永磁材料等,其内部存在着分子电流,能够形成磁场,转轴则用于输出机械转矩。异步交流电机的转子没有永磁体,但有转子绕组,绕组由导线缠绕而成,用于切割旋转磁场产生感应电流
2、交流伺服电机的工作原理交流伺服电机按照转子速度与旋转磁场是否同步,可以分为交流同步电机和交流异步电机。其工作原理均基于电磁感应定律,主要区别在于转子转动的速度与旋转磁场是否同步。具体如下
(1)永磁式同步伺服电机
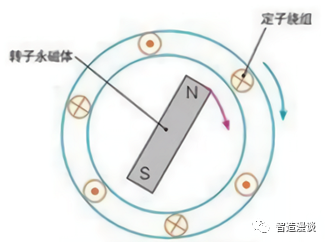
永磁式同步伺服电机的转子中装有永磁体,当定子绕组接通控制电压时,产生的电流共同作用产生一个合成的旋转磁场,永磁体产生的磁场与旋转磁场相互作用,使得转子与旋转磁场同步旋转。
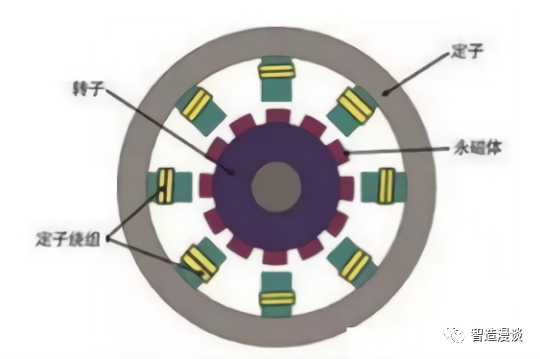
永磁同步电机的结构图和工作原理
(2)交流异步伺服电机
在异步交流伺服电机中,定子绕组接入交流电源,产生的旋转磁场被转子绕组上的导条切割,从而使转子绕组产生感应电流,感应电流在旋转磁场的作用下产生电磁力,带动转子随着定子旋转磁场转向旋转,但转子赶不上定子磁场变换的速度,或不同步所以称为做“异步”。如果转子与旋转磁场保持同步,转子绕组将无法被旋转磁场切割,感应电流不会产生,转子就不能保持匀速运动。
转子绕组被旋转磁场切割
(3)两者之间的比较优势由于永磁铁材料价格昂贵,相比于异步伺服电机,永磁式同步伺服电机的转子的造价、维修费用相对较高,且永磁体存在高温退磁的风险。但也因为转子部分无需借助切割磁场获得的感应电流,永磁式同步伺服电机不需要考虑转子铜耗(绕组电阻因发热产生的损耗),且由永磁材料提供磁场,功率密度高功率密度(计算公式:最大功率/电机体积或重量)衡量单位体积或重量产生的能量传输时间速率电机功率越大且体积、质量越小时,功率密度越高,当工业生产的空间有限时,功率密度是重要的考虑因素。永磁同步交流电机的功率密度范围在2左右,异步交流电机为0.3-1.0之间。随着新型电机控制理论和稀土永磁材料的快速发展,永磁同步电机的体积和重量进一步减小,性能也在持续提高。
03
编码器
1、构成
伺服电机编码器主要由敏感元件、转换元件和信号电路组成。绘编码器的敏感元件由发光管和玻璃码盘等部件组成,能将转子转轴的运动转变为光信号;光电接收管即为转换元件,能经放大整形电流将光这一物理量转变为电信号。
2、工作原理
编码器能够检测电机转速和位置,实时发送反馈信号到伺服驱动器,从而实现对伺服电机的闭环控制。因此,伺服电机的控制精确度很大程度取决于编码器的精度。当前广泛使用的数字编码器可以分为增量编码器与绝对值编码器两种
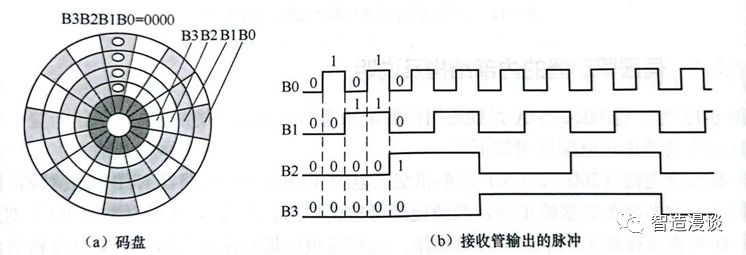
增量编码器接在转子转轴上,每旋转一定的角度或移动一定的距离会产生一个脉冲,输出脉冲随着位移增加而不断增多。以常用的光电编码器为例,该编码器主要由玻璃码盘、发光管、光电接收管和整形电路组成,玻璃码盘的结构如下图所示,黑色部分不透明,白色部分透明,可以通过光线,玻璃码盘套在转子中心的转轴上,与伺服电机同步旋转。编码器的发光管发出光线照射玻璃码盘,光线透过透明孔照射到光电接收管,从而得到脉冲,脉冲经放大整形后输出,反馈给伺服驱动器。工作原理说明图如下

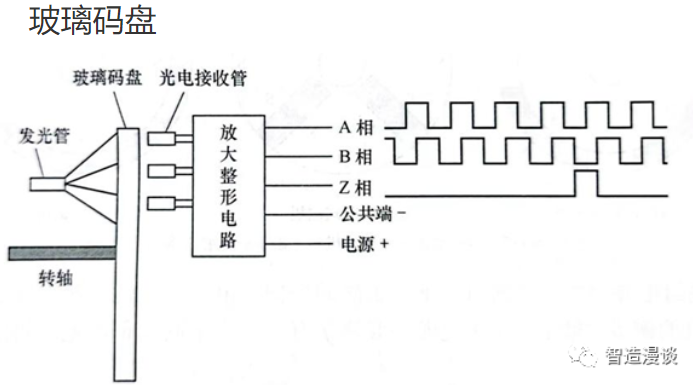
编码器旋转一周产生的脉冲个数即分辨率。码盘上刻出的透明孔越多,分辨率就越高。编码器的分辨率越高,说明编码器可读取并输出的电机最小角度就越小。
由于编码器检测电机的旋转位移采用相对方式若系统突然断电,相对脉冲个数未储存,再次通电后系统将无法知道执行机构的当前位置,需要让电机回到零位重新开始工作。绝对值编码器解决了这一问题。以4位二进制单圈绝对值编码器的码盘为例,该玻璃码盘分为4个环,每个环分成16等份,每个位置点都有唯一的编码。通过编码器输出的代码就能确定电动机的当前位置,输出代码的变化方向可以确定电动机的转向,如由0000往000[1][2]1变化为正转,1100往0111变化为反转,通过检测光电接收管产生的脉冲频率就能确定电动机的转速。单圈绝对值编码器定位不受断电影响,再次通电后,编码器当前位置的编码不变
02
伺服电机的性能评价体系及产品对比
在选型时,针对不同的应用情境,对于伺服电机各项性能的考量也会有所不同。下面将对几个常见的性能指标作出说明
01
额定转矩
额定转矩是电机在额定电压、额定频率下长期工作轴上输出的最大允许转矩,决定了伺服电机能否持续以定额功率、定额电流、定额转速输出。额定转矩越高,则电机的在一定电流比下的转矩越大。
03
负载特性
负载特性是额定转矩下电机持续负载运行,同时峰值转矩可满足几倍额定转矩的短时指标。负载特性越高,则伺服电机的过载能力越强。
04
编码器分辨率
编码器分辨率是指编码器在伺服电机旋转一圈所输出的绝对位置,可以起到实时检测伺服电机位置和速度的作用。编码器的分辨率越高,同服电机的最小刻度位置就越小,则伺服电机旋转的角位移也就越小,控制的精度也就越高。
下表列出了几款产品的指标参数
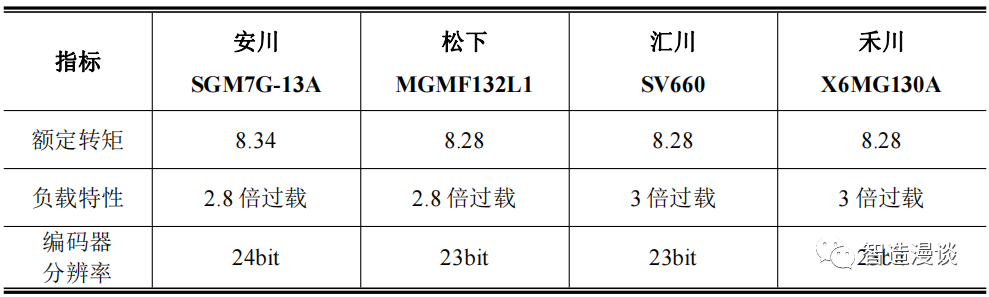
注:数据来源于禾川科技首次公开发行股票并在科创板上市招股说明书
除了上述指标之外,伺服电机额定功率的大小,运行噪音大小、体积与质量等也常常成为选型时进行比较的指标。
03
伺服电机与步进电机的对比
伺服电机与步进电机都是当前市面上常见的电机类型,但交流伺服在性能方面普遍优于步进电机。具体参数对比如下
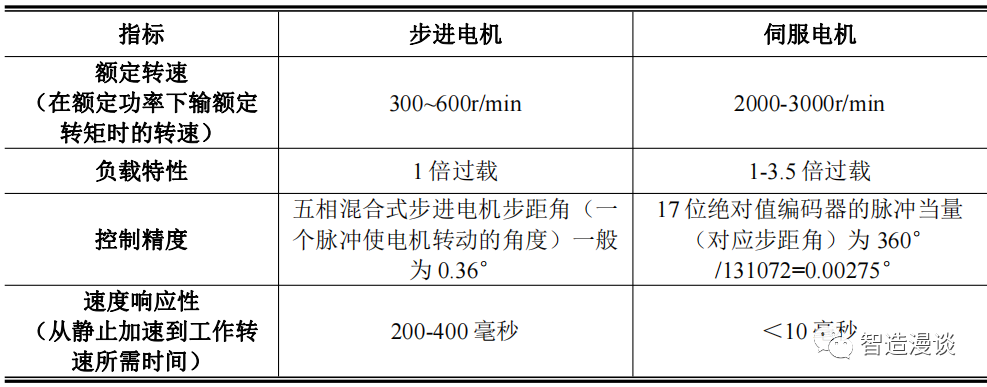
虽然在上述三个指标中伺服电机表现更优,但步进电机具有低价优势。一般来说,伺服电机的价格是步进电机的 2-5 倍。
04
名词解释
1、漏电抗:漏电抗简称漏抗是由漏磁通引起的。在电机的绕组中,通入电流,将产生磁通,根据磁通的路径,可以分为主磁通和漏磁通两部分。漏磁通则是只与产生它的绕组交链(只穿过产生它的绕组),漏磁通不起能量转换、传递的作用,只产生自感电动势,引起自感压降。描述漏磁通可以用一个电抗表示,就是漏电抗。
2、转矩:各种工作机械传动轴的基本载荷形式,与动力机械的工作能力、能源消耗、效率、运转寿命及安全性能等因素紧密联系,转矩的测量对传动轴载荷的确定与控制、传动系统工作零件的强度设计以及原动机容量的选择等都具有重要的意义。
3、电磁转矩:电磁转矩是电动机旋转磁场各极磁通与转子电流相互作用而在转子上形成的旋转力矩。是电动机将电能转换成机械能最重要的物理量之一。当电枢绕组中有电枢电流流过时,通电的电枢绕组在磁场中将受到电磁力,该力与电机电枢铁心半径之积称为电磁转矩。
4、负载:在物理学中指连接在电路中的两端具有一定电势差的电子元件,用于把电能转换成其他形式的能的装置;在电工学中指在电路中接收电能的设备,是各类用电器的总称。
5、电机的机电时间常数:机械时间常数,是电动机从启动到转速达到空载转速的63.2%时所经历的时间。
6、转动惯量:是刚体绕轴转动时惯性(回转物体保持其匀速圆周运动或静止的特性)的量度,用字母l或J表示,
7、功率因数:功率因数是指交流电路有功功率对视在功率的比值。用户电器设备在一定电压和功率下,该值越高效益越好,发电设备越能充分利用。
8、脉冲当量:当控制器输出一个定位控制脉冲时,所产生的定位控制移动的位移。对直线运动来说,是指移动的距离,对圆周运动来说,是指其转动的角度。
产品
应用
服务
资讯
公司

 首页
首页 产品
产品 资讯
资讯 电话
电话