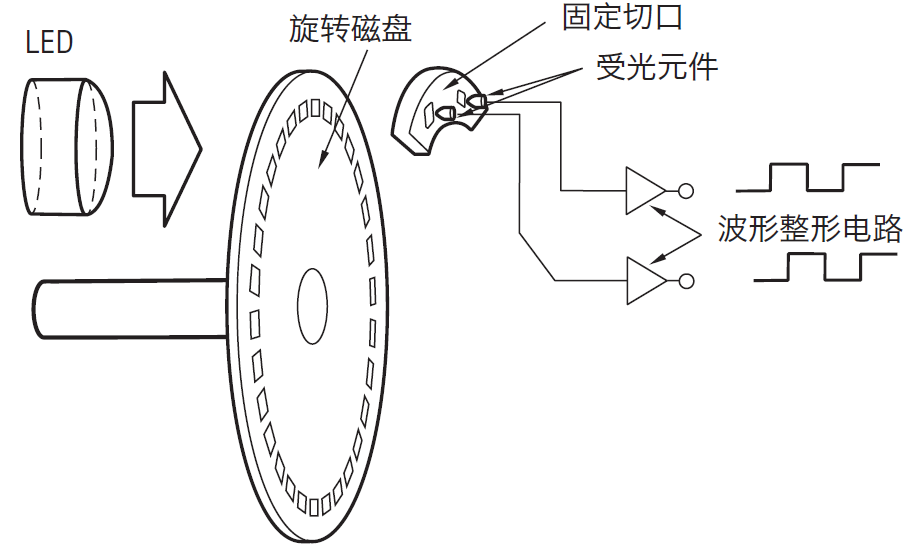
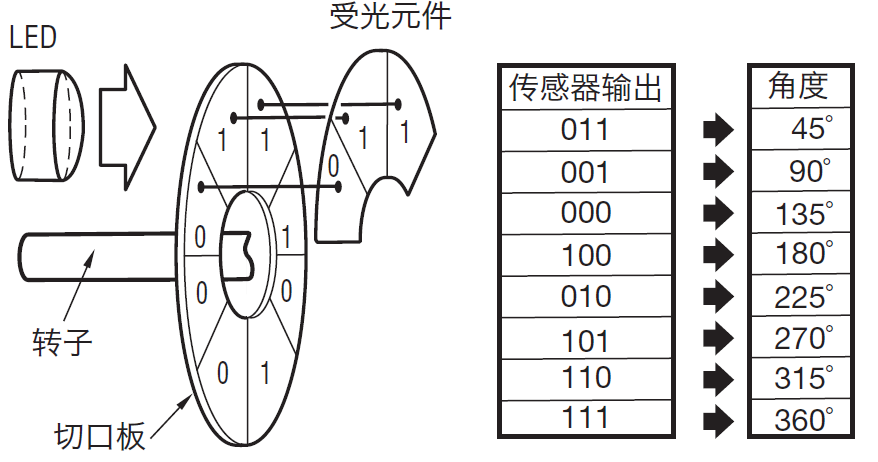
编码器是检测电机转速和位置的传感器。
发光二极管(LED)发出的光线穿过切口圆盘上的位置检测模式,由受光元件读取。受光元件上集成有数十个光电晶体管。绝对位置检测用模式因编码器的旋转角度不同而全部不同。
编码器搭载CPU,对绝对位置检测用模式进行分析。通过串行通信将该当前位置数据传送到伺服驱动器。
编码器的种类
绝对式编码器电机搭载编码器,用于向驱动器反馈电动机轴的旋转位置及转速。
根据构造的不同,可以分为绝对式编码器与增量式编码器两类。
本公司的AC伺服电动机NX系列使用了20bit的绝对式编码器,实现了在低速领域的低振动。
绝对式编码器可检测电动机旋转一圈内的绝对位置,并输出旋转角度的绝对位置。
通常,通电后先发送旋转圈速信息至驱动器,再输出当前位置信号。
增量式编码器用于检测电动机的旋转量、转速、旋转方向的编码器。
对应角度的变化,输出相应的脉冲信号。通常,直接发送检测出的波形,因此停电时当前位置无法保存。
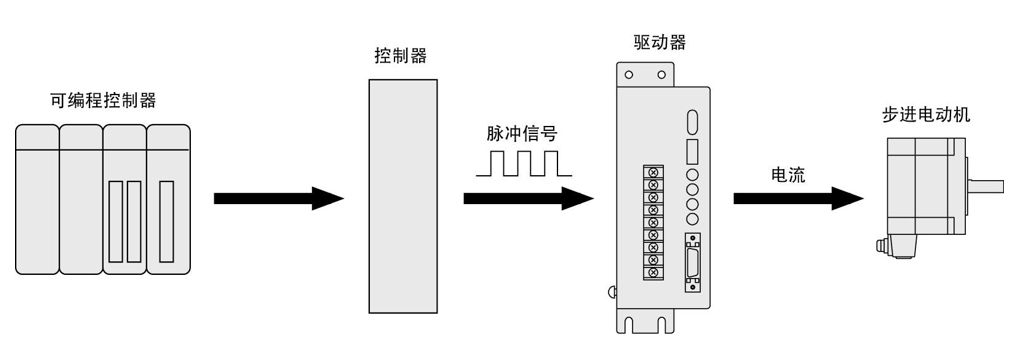
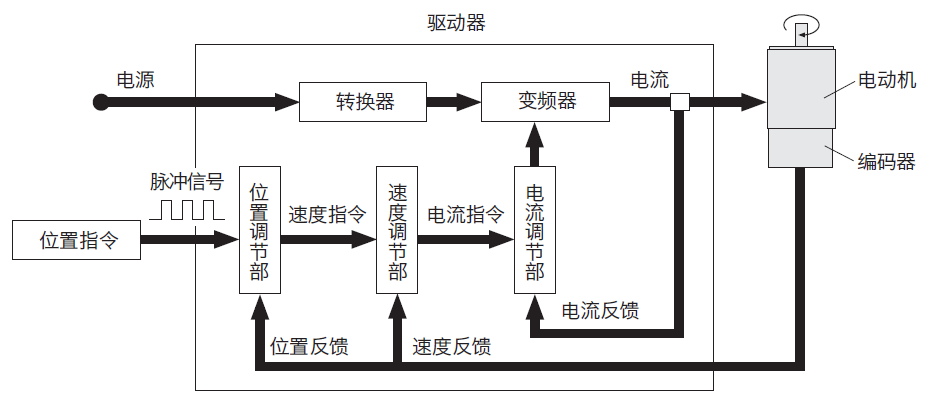
AC伺服电机的控制配置图
对来自外部的脉冲信号(脉冲序列输入型时)和伺服电机的编码器检测到的运转量进行计数,将其差分(偏差)输出到速度控制部。这个计数器被称为偏差计数器。
电机旋转过程中,偏差计数器出现积存脉冲(=位置偏差),将该积存脉冲控制为0。
通过定位环(偏差计数器)实现了保持当前位置的(伺服锁定)功能。
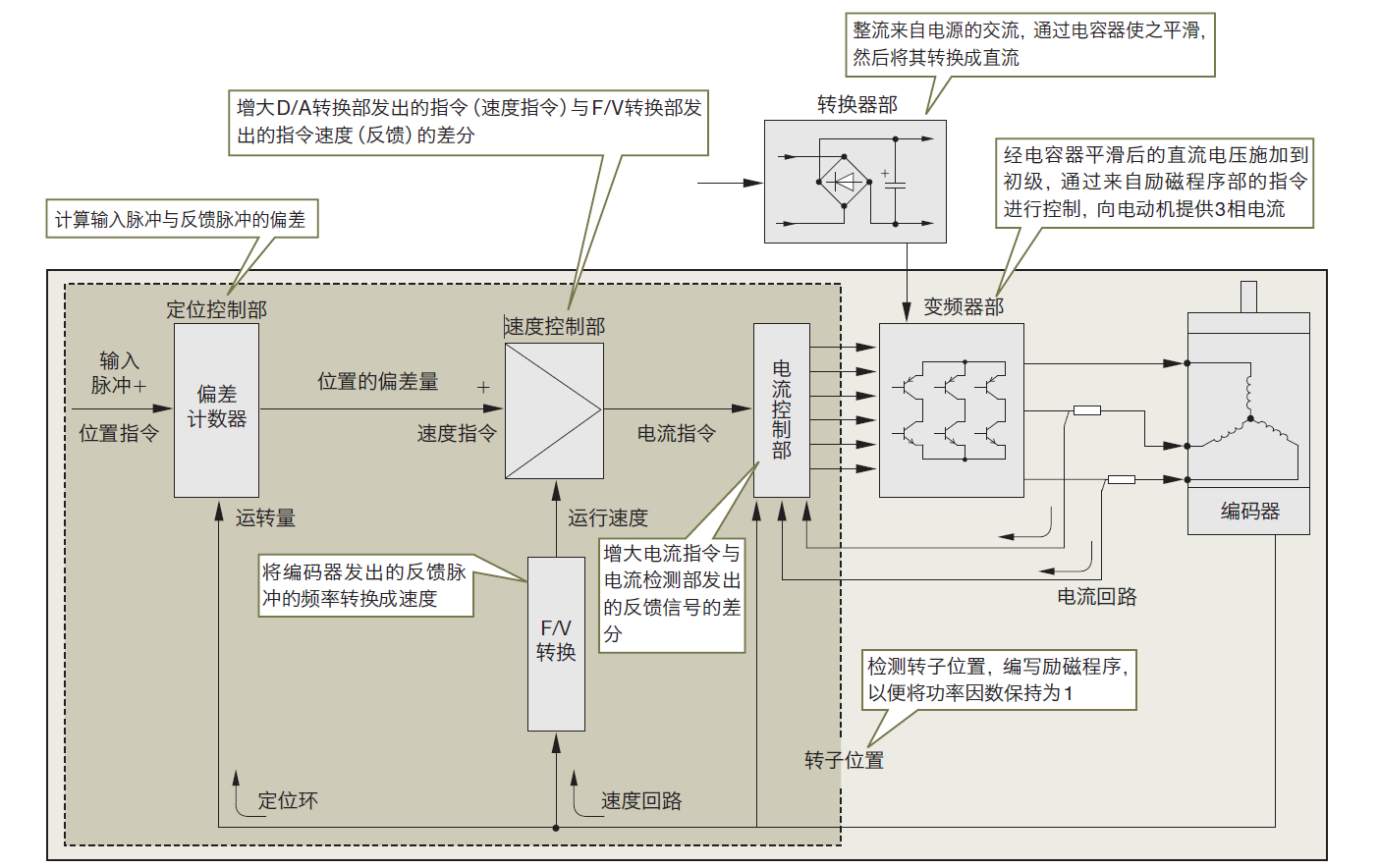
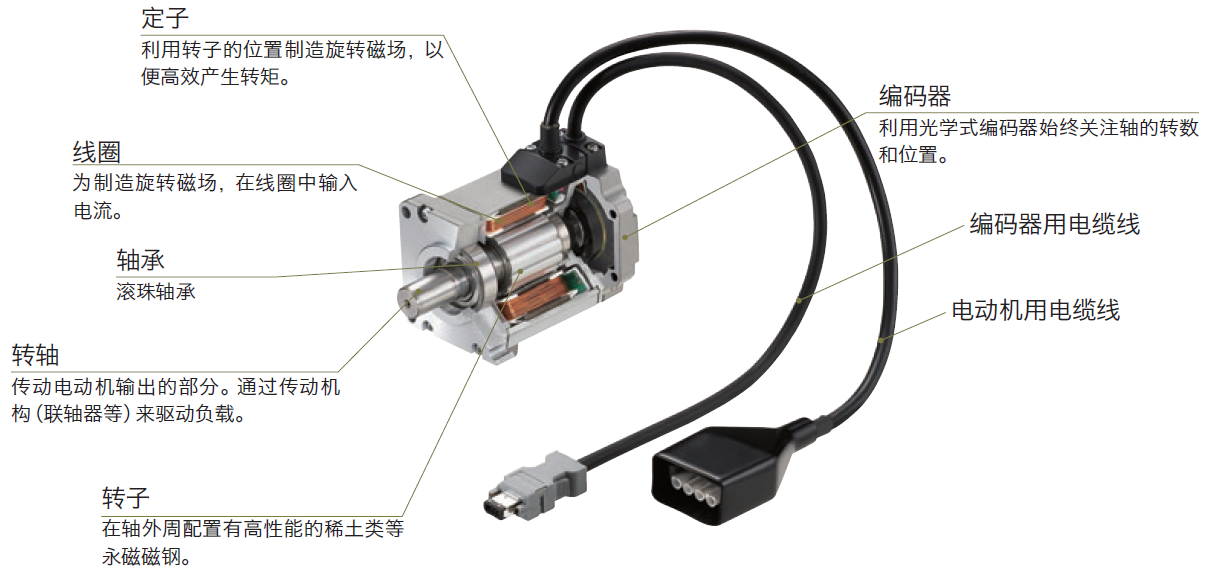
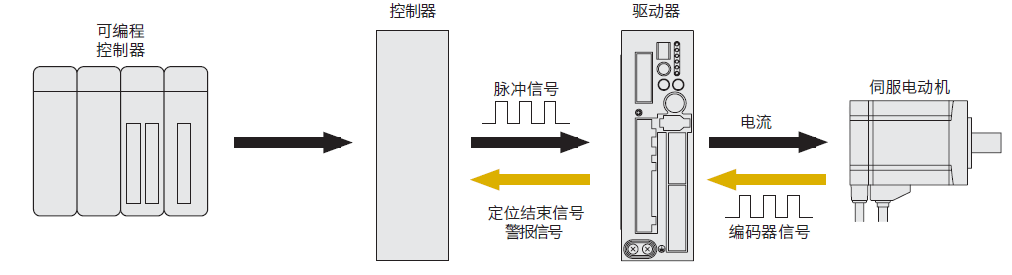
AC伺服电机由电动机和编码器、以及驱动器3个要素构成,驱动器的作用是对位置指令和编码器的位置、速度信息进行比较,控制驱动电流。 AC伺服电机时常会通过编码器的位置、速度信息检测电机的状态,因此,万一电机停止运行,也能够向控制器侧输出警报信号,检测出异常状态。 AC伺服电机必须根据机构的刚性及负载条件来调整控制系统的参数,但近年来采用了实时自动增益调整,这种调整变得非常简单。
闭环控制与系统构成示例
下图为脉冲型驱动器驱动伺服电机时的系统构成示例。 电机搭载旋转检测器(编码器),向驱动器反馈电机轴的旋转位置/转速。驱动器通过演算从控制器发出的脉冲信号(位置指令/速度指令)与反馈信号(当前位置/速度)的误差,将此误差控制为0,进行电动机旋转的控制。是通过使用电机、驱动器、编码器构成闭环控制,可以进行高精度定位运行的电机。



 首页
首页 产品
产品 资讯
资讯 电话
电话